













產(chǎn)品類(lèi)別
首頁(yè)
關(guān)于我們

產(chǎn)品系列
新聞動(dòng)態(tài)
聯(lián)系我們


新聞動(dòng)態(tài)
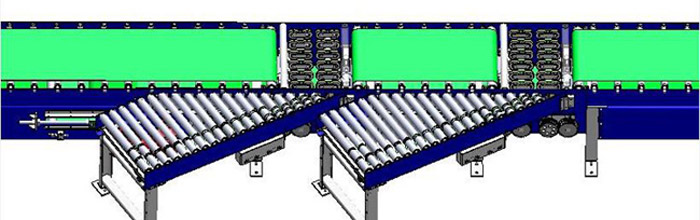
智能機(jī)械手的組成部分
2021-11-15 來(lái)源:yqwt.com.cn 編輯:物流輸送設(shè)備
搜索本站
網(wǎng)站分享

社交媒體
汽車(chē)內(nèi)飾發(fā)泡機(jī) | 智能流水線(xiàn) | 智能輸送設(shè)備 | 智能機(jī)械手 | 流水線(xiàn)設(shè)備 | 升降機(jī)設(shè)備 | 寧波雅智自動(dòng)化科技有限公司 | Powered by YaZhi.COM 站點(diǎn)支持:寧波網(wǎng)站建設(shè) | 浙ICP備18040748號(hào)-1